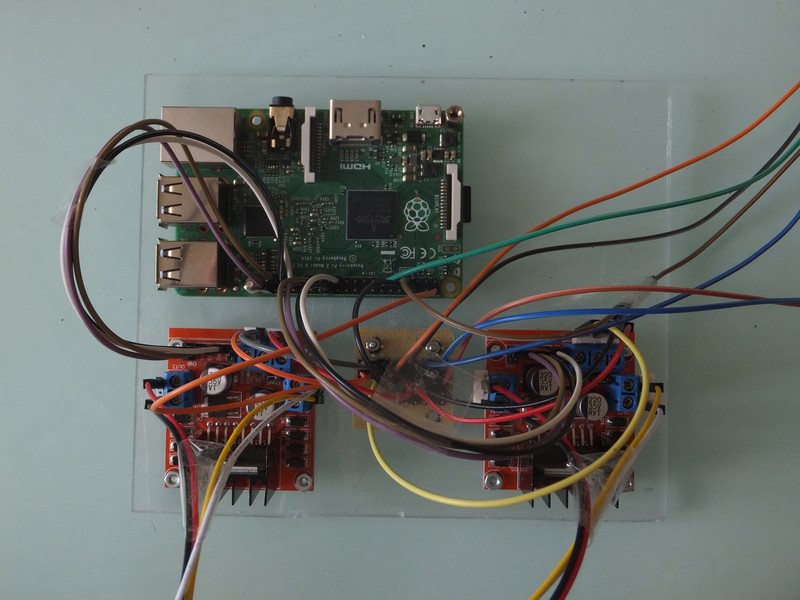
Le schéma général de câblage est très simple et gère en entrée / sortie uniquement une LED IR et deux doubles ponts en H.
Le reste est connectique et cosmétique.
Il faut savoir que amplifier les signaux par l'intermédiaire d'un double darlington (ULN2803 par exemple) est une mauvaise idée
Cela passe pour les petits moteurs unipolaires chinois à forte résistance par bobine mais ne marchera pas pour un bipolaire.
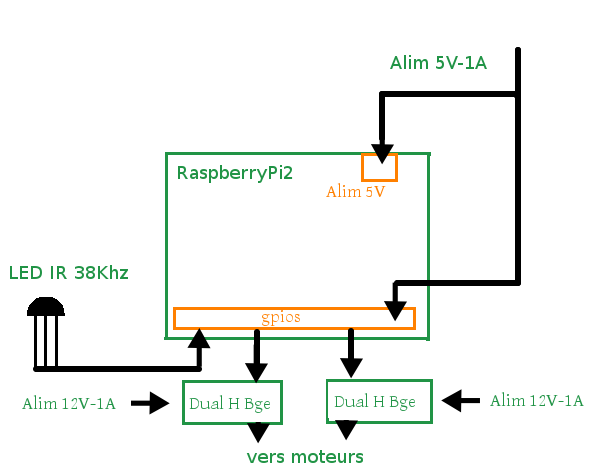
INPUTS
- une led ir tsop 38kHz en entrée sur les ports gpios de la raspi2
- alimentation 5V-1A (raspi)
- alimentation 6-12V 1-2A (moteurs)
Par défaut sur le proto final et la carte finale, le port d'entrée pour la LED-IR est le port GPIO27
Cette valeur peut être retrouvée et modifiée :
- soit dans le fichier de config /boot/config.txt si on passe par le boot linux utilise les "overlays" :
- dtoverlay=lirc-rpi,gpio_in_pin=27
- soit dans le fichier /etc/init.d/rcS qui charge les modules après le boot du noyau avant de lancer les services
- /sbin/insmod <path_modules>/lirc_rpi.ko gpio_in_pin=27
Dans tous les cas, cette valeur peut être vue au boot du système avec la commande dmesg
et on peut constater les modules chargés avec la commande lsmod
OUTPUTS
- port des signaux moteurs (4 broches GPIOS) vers deux Dual-H-Bridge (L298N ou bien SN754410, etc..)
CONNECTIQUE
- la connectique doit permettre de relier les sorties des Double ponts en H aux moteurs des montures portant un port 6P6C (RJ11/12)
- la connectique doit permettre de brancher simplement un câble d'alimentation idéalement en 5.5-2.1 mm
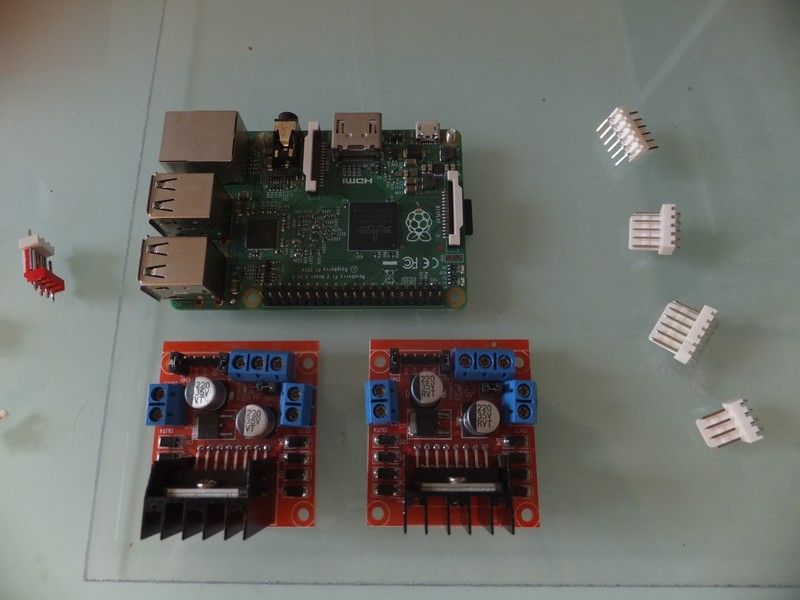
LISTE DES COMPOSANTS
- deux doubles ponts en H type L298N ou bien SN754410
- une LED réceptrice IR TSOP 38KHz
- deux résistances 10K
- une LED rouge
- une résistance 1K
Si on utilise une régulation en tension pour l'alimentation de la RaspberryPi2 (non obligatoire) ou bien pour les moteurs (non obligatoire), il faut en supplément :
- un régulateur 5V-1A (idéalement de type LM2940CT)
- un régulateur 12V-2A (idéalement de type LM2940CT)
De meilleurs résultats ont été obtenus avec les LM2949CT qu'avec des régulateurs à découpage.
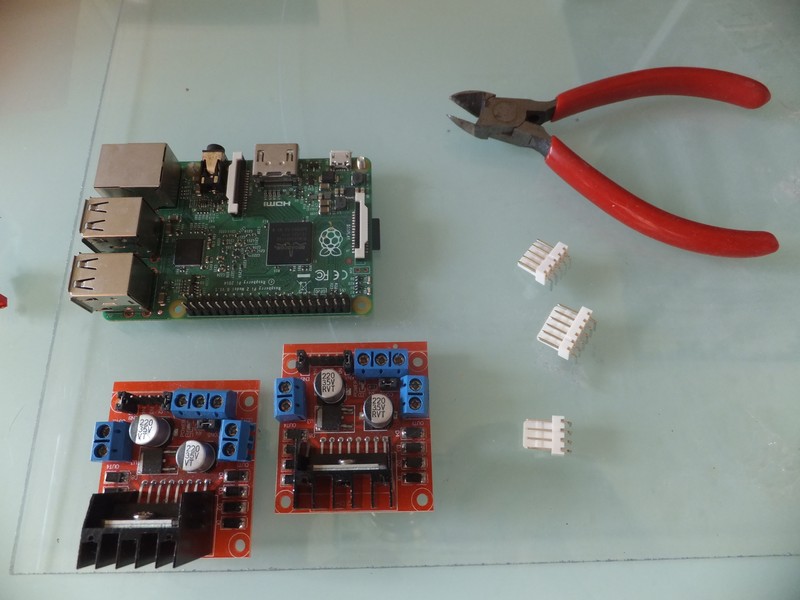
Une vidéo à venir pour montrer le câblage à partir de "modules tout prêts" trouvés sur internet comme ceux-ci :
| COMPOSANT / MODULE / "shield" | où le trouver ? | à quoi ça sert ? |
|---|---|---|
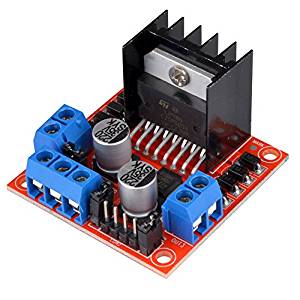 |
AMAZON | Réalisé autour du L298N, ce module sert à amplifier les signaux provenant des gpios de la RaspberryPi2 afin de les adapter en tension / courant pour attaquer les bobine des moteurs PAP.
|
 |
AMAZON | ces câbles servent à relier les borniers aux broches de circuit imprimé mâle (embout femelle) |
 |
AMAZON | Ces connecteurs servent à passer d'un câble cité précédemment (embout mâle sur bornier) à une connectique à base de coaxiaux DC (câble d'alimentation générique)
L'embout mâle DC doit être remplacé par un câble mâle DC provenant d'une alimentation USB (câble USB / DC) |
 |
AMAZON | Chargeur de téléphone de portable de secours. Sert à fournir une alimentation stabilisée pour la RaspberryPi2 en 5V-1A. Doit être branché sur un câble USB / DC. |
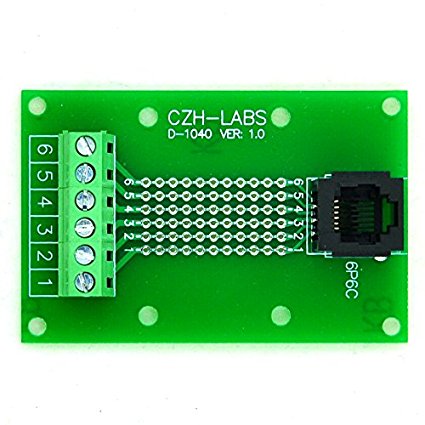 |
KOOING | Permet de passer d'une connectique à base de fils de circuits imprimés à une embase RJ11 - 6P6C, qui permet ensuite d'attaquer une monture du comemerce ayant un port RJ11 (avec les moteurs derrière) permet de simplifier la connectique allant aux moteurs |
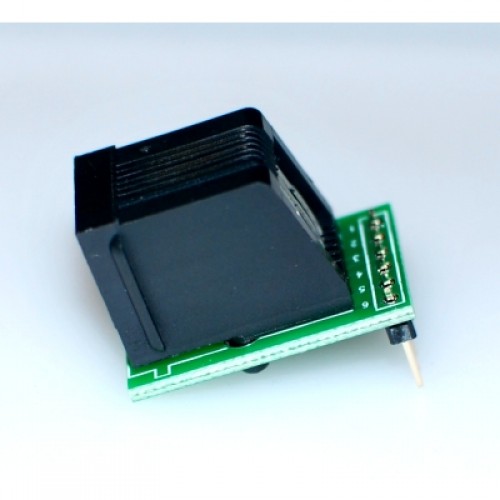 |
KOOING | Idem mais connectique femelle CI au lieu de bornier. |
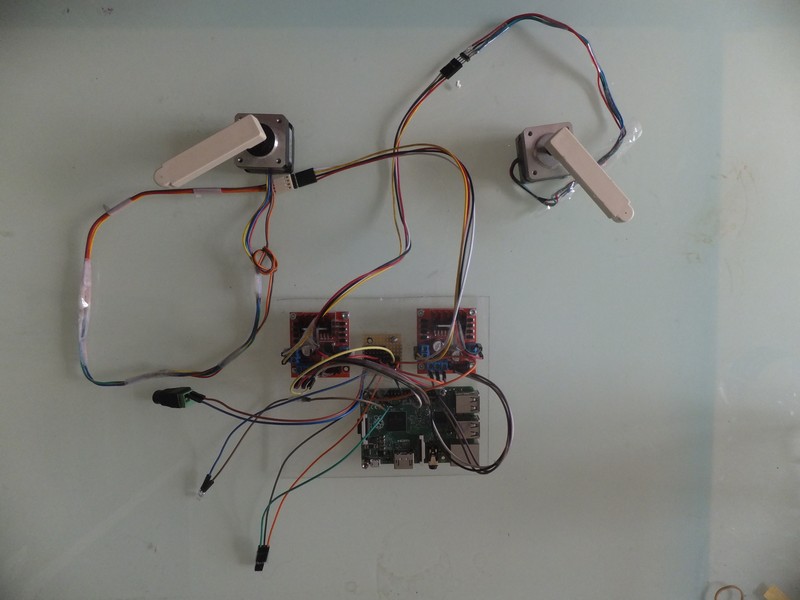
EXEMPLE de MONTAGE