Installation du système
- procédure d'installation sous linux
- procédure d'installation sous Windows (à venir)
| Fichiers | Type | Carte | Architecture | Taille | Version |
| rootfs.img.7z | image de la partition de root (système de fichier en ext3) | RPI2 | armv7 / armhf | 3 Mo | 1.0 |
| bootfs.img.7z | image de la partition de boot (système de fichier en vfat) | RPI2 | armv7 / armhf | 5 Mo | 1.0 |
| sdcard.img.7z | image compressée de la micro sd card entiere | RPI2 | armv7 / armhf | 8 Mo | 1.0 |
| sdcard.img.7z | image compressée de la micro sd card entiere (new) | RPI2 | armv7 / armhf | 10 Mo | 1.1 |
| available sept 2022 | bootfs / rootfs / iso sdcard | RPI3a+ | armhf | 1 Go | 2.1 |
| available sept 2022 | bootfs / rootfs / iso sdcard | RPI3b+ | armhf | 1 Go | 2.1 |
Résumé installation avec l'image complète de la micro-sdcard (sdcard.img.7z)
Partie 4 - Préparation de la sdcard directement à partir de son image
Toutes les commandes en root (administrateur)
Si on n'est pas root, pour un utilisateur lambda, il faut le paquet sudo installé, qu'il ait les droits dans /etc/sudoers pour utiliser sudo
Il faut disposer de l'outil 7zip.
Fichiers à télécharger :
- sdcard.img.7z
Cette fois, au lieu de travailler au niveau des images des partitions de la sdcard, on travaille directement sur le device en entier.
- télécharger le fichier compressé .7z
- mettre la sdcard dans le lecteur sdcard
- démonter la sdcard via un umount <point de montage> si elle a été montée automatiquement par l'automounter de linux
on peut voir le point de montage avec df -h
une fois installée dans le lecteur sd et démontée (on suppose que la carte est vue comme /dev/mmcblk0)
- 7z e sdcard.img.7z
- dd if=/dev/zero of=/dev/mmcblk0 bs=512k
- dd if=./sdcard.img of=/dev/mmcblk0 bs=512k
- sync
La micro sd card est prête.
Electronique : carte finale 1 (à relier à la RasberryPi2 via des starter kits)
Cette carte est plus simple à réaliser que la carte finale suivante (2) car il n'y a pas de broche GPIO femelle - femelle à souder côté cuivre.
Les connexions entre RPI et la carte se font à l'aide de fils de circuits imprimés femelle - femelle
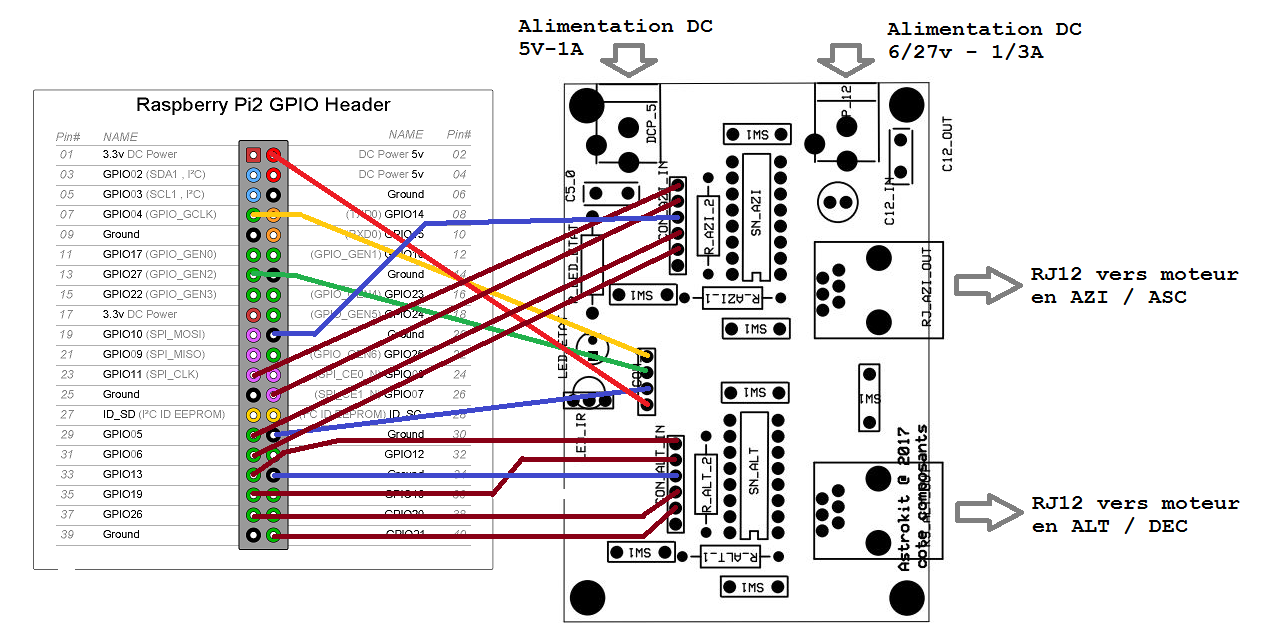
- schéma de câblage
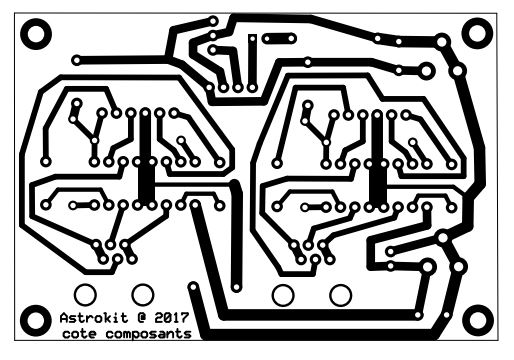
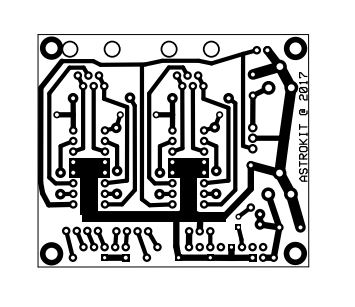
- typon : PDF à télécharger
- typon : aperçu
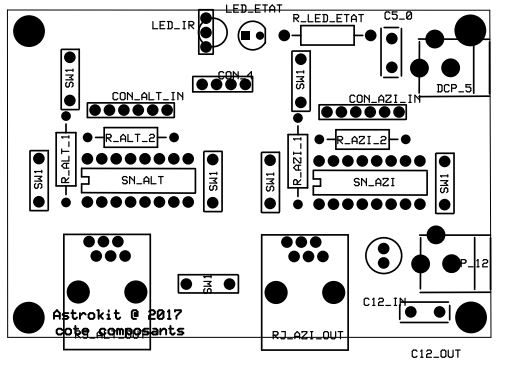
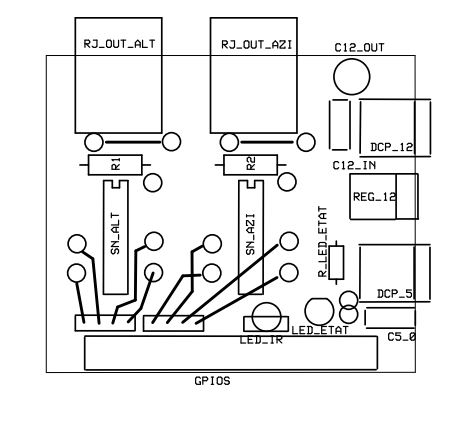
- implantation composants : PDF à télécharger
- implantation composants - connecteurss à relier à la RaspberryPI :
- CON_ALT_IN
- CON_AZI_IN
- CON
- implantation composants : aperçu
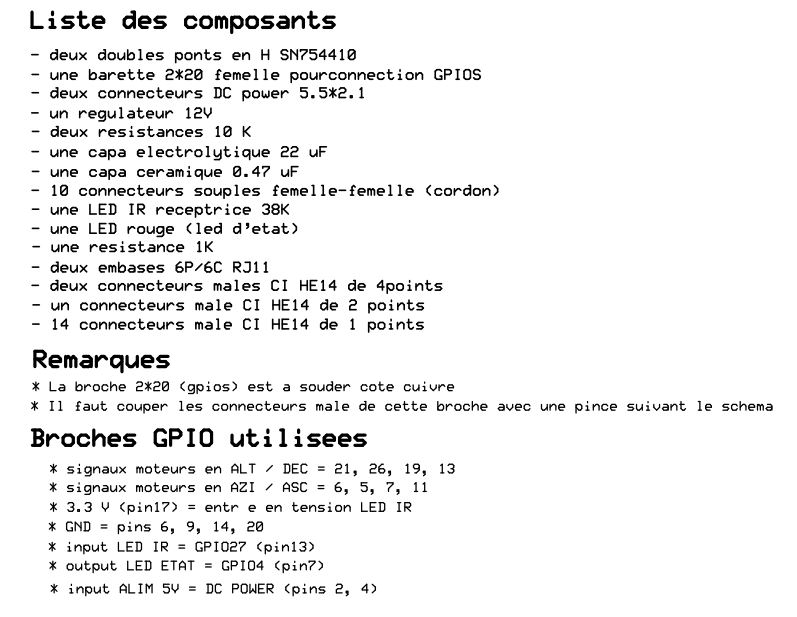
- liste des composants sur la page carte finale
- connexions à réaliser
| nom | RPI - GPIOs | CARTE | commentaires |
|---|---|---|---|
| 5V | 5V | CON_ALT_IN 1 | facultatif si SWITCH "ON" |
| moteur en ALT / DEC - phase 1 | GPIO21 | CON_ALT_IN 2 | |
| moteur en ALT / DEC - phase 2 | GPIO26 | CON_ALT_IN 3 | |
| masse | GROUND | CON_ALT_IN 4 | gpio ground quelconque |
| moteur en ALT / DEC - phase 3 | GPIO19 | CON_ALT_IN 5 | |
| moteur en ALT / DEC - phase 4 | GPIO13 | CON_ALT_IN 6 | |
| 5V | 5V | CON_ALT_IN 2 | facultatif si SWITCH "ON" |
| moteur en AZI / ASC - phase 1 | GPIO06 | CON_AZI_IN 2 | |
| moteur en AZI / ASC - phase 2 | GPIO05 | CON_AZI_IN 3 | |
| masse | GROUND | CON_AZI_IN 4 | gpio ground quelconque |
| moteur en AZI / ASC - phase 3 | GPIO11 | CON_AZI_IN 5 | |
| moteur en AZI / ASC - phase 4 | GPIO07 | CON_AZI_IN 6 | |
| 5V | 5V | CON_4 1 | gpio 5V pin 2 ou pin4 |
| masse | GROUND | CON_4 2 | gpio ground quelconque |
| LED_IR | GPIO27 | CON_4 3 | entrée signal IR |
| LED_ETAT | GPIO04 | CON_4 4 | sortie signal LED ETAT |
- LE CABLAGE avec uniquement LED_IR, LED_ETAT, MASSE et 5V connectés aux GPIOS
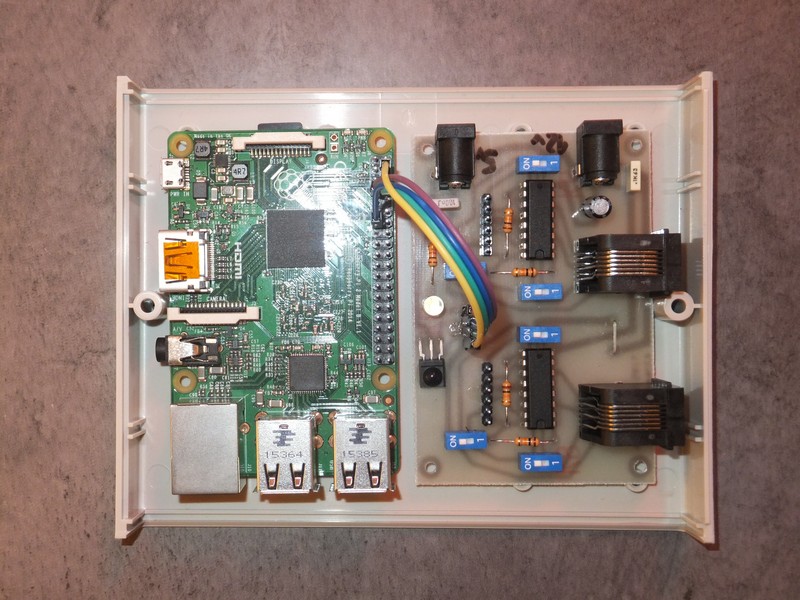
- LE CABLAGE complet
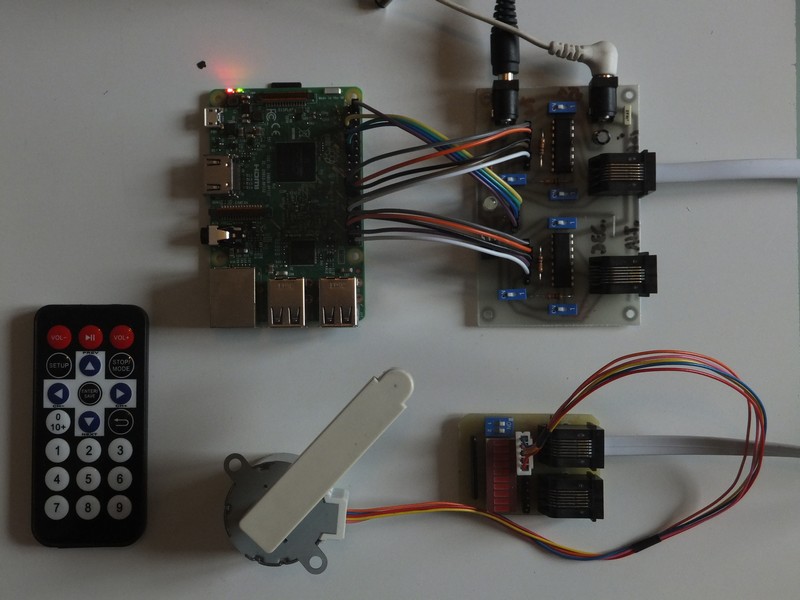
- LE MONTAGE COMPLET AVEC LES ALIMENTATIONS
- l'alimentation moteurs provient du secteur via un transfo : 220V => 12V-1.5 A
- l'alimentation RPI3 provient d'un chargeur universel 5V-1A avec un câble USB-DC
- on ne voit qu'un seul moteur connecté au RJ12 grâce à un petit adaptateur RJ12-CI
- l'alimentation à piles (celle d'une motorisation neq32) donne le même gabarit DC 5.5-2.1 (non connecté sur la photo)

Electronique : carte finale 2 (s'enfichant directement sur les ports GPIO)
- schéma de câblage
- typon : PDF à télécharger
- typon : aperçu
- implantation composants
- composants & réalisation