
Cette monture m'a servi de monture de tests pour vérifier les calculs et valider le logiciel.
Dans un premier temps je réalise une structure très simple en contreplaqué.
Les tourillons sont surdimensionnés pour le diamètre du télescope allant dessus (un T90 à F/D 9)
afin de minimiser les erreurs liées aux axes de la monture.

L'étape suivante est la réalisation de deux roues dentées de fortune
L'étape suivante est la réalisation de deux roues dentées de fortune
dont les tourillons sont grands, avec un pas de vis M10,
ce qui au final, me permet une réduction de 1/750.
Grâce à ces roues dentées, je finalise un système d'entraînement assez original
et pensé pour minimiser les erreurs de suivis liées à la monture, ce qui me permet de gagner
en précision pour tester les erreurs éventuelles liées au logiciel embarqué et aux calculs.
- le moteur est fixé à un support
- la vis sans fin est relié au moteur et solidaire de ce moteur
- elle est libre de mouvement à son autre extrémité dans un roulement conique
- le palier du roulement conique est lui même fixé sur une extrémité mais libre sur l'autre
- le roulement est contraint sur sur la vis par une force de pression (d'où l'élastique)
Je constate avec cette solution un meilleur suivi qu'avec des roulements fixes.
En effet, le positionnement de la vis est entièrement déterminé par le moteur,
dont il est solidaire, et le reste est libre de mouvement longitudinalement,
ce qui élimine les contraintes mécaniques imposées à la vis si elle était dans son axe avec des roulements fixes.
C'est comme pour un miroir qui est contraint mécaniquement : c'est moins précis.
En laissant un degré de liberté sur un axe du repère xyz, on élimine le jeu sur les autres axes.
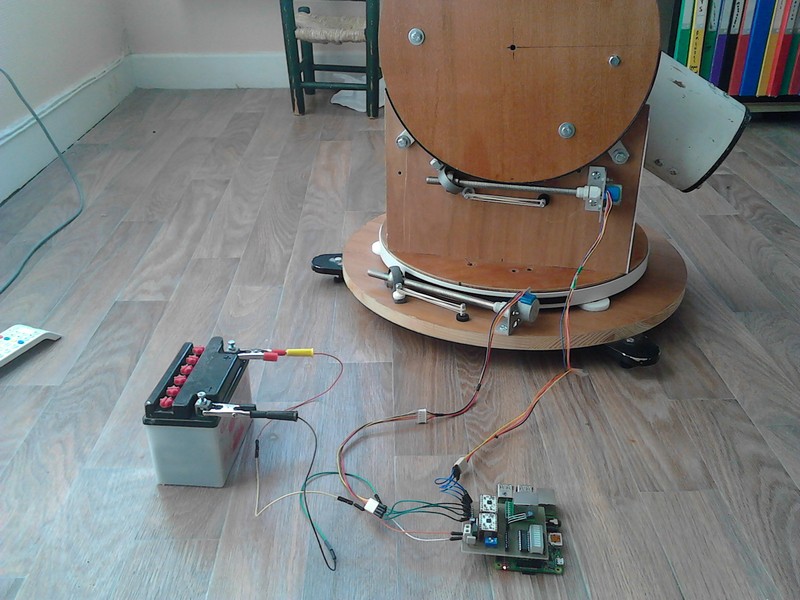
Une fois terminée, cela donne cette petite monture pas très simple à utiliser mais suffisante
pour tester et valider le logiciel.
et pensé pour minimiser les erreurs de suivis liées à la monture, ce qui me permet de gagner
en précision pour tester les erreurs éventuelles liées au logiciel embarqué et aux calculs.
- le moteur est fixé à un support
- la vis sans fin est relié au moteur et solidaire de ce moteur
- elle est libre de mouvement à son autre extrémité dans un roulement conique
- le palier du roulement conique est lui même fixé sur une extrémité mais libre sur l'autre
- le roulement est contraint sur sur la vis par une force de pression (d'où l'élastique)
Je constate avec cette solution un meilleur suivi qu'avec des roulements fixes.
En effet, le positionnement de la vis est entièrement déterminé par le moteur,
dont il est solidaire, et le reste est libre de mouvement longitudinalement,
ce qui élimine les contraintes mécaniques imposées à la vis si elle était dans son axe avec des roulements fixes.
C'est comme pour un miroir qui est contraint mécaniquement : c'est moins précis.
En laissant un degré de liberté sur un axe du repère xyz, on élimine le jeu sur les autres axes.
Une fois terminée, cela donne cette petite monture pas très simple à utiliser mais suffisante
pour tester et valider le logiciel.